

 如果结果不匹配,请
如果结果不匹配,请 
 更多“量水尺的最小分度值为()。”相关的问题
更多“量水尺的最小分度值为()。”相关的问题
第1题
已知一标准渐开线齿轮一一齿条传动,其模数m=5mm,压力角a=20°,齿顶高系数h*a=1,顶隙系数c*
=0.25.试用1:1的比例作图:(齿数Z=10)
点击查看答案
(1)作出啮合时齿轮的分度圆和齿条的分度线;
(2)作出齿轮的齿顶圆和齿顶线;
(3)作出齿轮的基圆;
(4)作出齿轮与齿条传动的啮合线;
(5)作出其啮合节点;
(6)作出真实啮合线段B1B2;
(7)作出齿条齿廓上的工作段(参与啮合的一段齿廓);
(8)作出用齿条形刀具切制该齿轮时,为保证不根切,齿条刀具的最小变位距离xm.
第3题
设有单位反馈的火炮指挥仪伺服系统,其开环传递函数为: 若要求系统最大输出速度为2r/min,输
设有单位反馈的火炮指挥仪伺服系统,其开环传递函数为:
 若要求系统最大输出速度为2r/min,输出位置的容许误差小于2°,试求: (1)确定满足上述指标的最小K值,计算该K值下系统的相角裕量和幅值裕量。 (2)在前向通路中串接超前校正网络:
若要求系统最大输出速度为2r/min,输出位置的容许误差小于2°,试求: (1)确定满足上述指标的最小K值,计算该K值下系统的相角裕量和幅值裕量。 (2)在前向通路中串接超前校正网络:
 计算校正后系统的相角裕量和幅值裕量,说明超前校正对系统动态性能的影响。
计算校正后系统的相角裕量和幅值裕量,说明超前校正对系统动态性能的影响。
第5题
(电子科技大学2007年硕士研究生入学考试试题)已知某负反馈系统的开环对数渐近幅频特性如图5-54所
(电子科技大学2007年硕士研究生入学考试试题)已知某负反馈系统的开环对数渐近幅频特性如图5-54所示,设系统开环放大系数为K,图中ω2=4,且ω=0.1处的幅值为40dB。
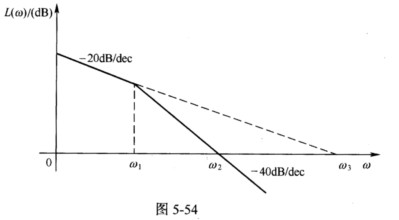 (1)证明:ω22=ω1ω3。 (2)设系统为最小相位系统,求相角裕量γ。
(1)证明:ω22=ω1ω3。 (2)设系统为最小相位系统,求相角裕量γ。
第6题
深度游标卡尺的尺身和尺框测量面的平面度,分度值为0.02和0.05mm的不应大于();分度值为0.1mm的应不大于()。
深度游标卡尺的尺身和尺框测量面的平面度,分度值为0.02和0.05mm的不应大于();分度值为0.1mm的应不大于()。
点击查看答案
 ,今采用分度值i=0.01mm的外径千分尺测量。试确定验收极限。
,今采用分度值i=0.01mm的外径千分尺测量。试确定验收极限。
第10题
判断正误。精度要求一般的工件,为使测量误差小,就要选择分度值越小、灵敏度越高的量仪进行测量()。
判断正误。精度要求一般的工件,为使测量误差小,就要选择分度值越小、灵敏度越高的量仪进行测量( )。
















