

 如果结果不匹配,请
如果结果不匹配,请 
 更多“求方程xlgx=1的近似根,使误差不超过0.01.”相关的问题
更多“求方程xlgx=1的近似根,使误差不超过0.01.”相关的问题
第2题
利用函数的幂级数展开式,求下列各数的近似值:(1)ln3(误差不超过0.0001)
利用函数的幂级数展开式,求下列各数的近似值:
(1)ln3(误差不超过0.0001);(2)cos2o(误差不超过0.0001)
第3题
系统结构如图3.62所示,,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统
系统结构如图3.62所示,
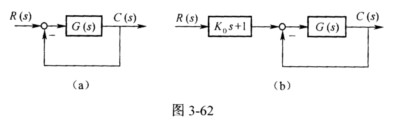 ,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
第4题
利用函数的幂级数展开式求下列各数的近似值: (1)ln3(误差不超过10-4); (2)(误差不超过10-5);
利用函数的幂级数展开式求下列各数的近似值: (1)ln3(误差不超过10-4); (2)
 (误差不超过10-5); (3)sinh0.5(误差不超过10-4); (4)sin3°(误差不超过10-5).
(误差不超过10-5); (3)sinh0.5(误差不超过10-4); (4)sin3°(误差不超过10-5).
第7题
用形如的函数近似代替f(x),α1,α2,α3为给定常数.求c1,c2,c3使近似函数y(x)与被近似函数f(x)在给定点相等,称y
用形如


第9题
(中国科学院一中国科学技术大学2006年硕士研究生入学考试试题)反馈控制系统如图所示。取。 (1)确
(中国科学院一中国科学技术大学2006年硕士研究生入学考试试题)反馈控制系统如图所示。取
 。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
 =0的实数根。
=0的实数根。















