 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知最小相位系统(单位反馈系统)的开环幅相频率特性如图5-61所示。 试求: (1)目前该系统
已知最小相位系统(单位反馈系统)的开环幅相频率特性如图5-61所示。
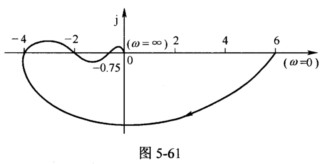 试求: (1)目前该系统的无差度γ及开环放大系数K。 (2)目前该系统的稳定性。 (3)为使系统稳定K的取值范围。
试求: (1)目前该系统的无差度γ及开环放大系数K。 (2)目前该系统的稳定性。 (3)为使系统稳定K的取值范围。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知最小相位系统(单位反馈系统)的开环幅相频率特性如图5-61所示。
试求: (1)目前该系统的无差度γ及开环放大系数K。 (2)目前该系统的稳定性。 (3)为使系统稳定K的取值范围。
如果结果不匹配,请 联系老师 获取答案
 更多“已知最小相位系统(单位反馈系统)的开环幅相频率特性如图5-6…”相关的问题
更多“已知最小相位系统(单位反馈系统)的开环幅相频率特性如图5-6…”相关的问题
已知单位反馈系统的开环传递函数: ,设计一串联滞后校正装置,使系统满足下列要求:(1)相位裕度γ>40°;
,设计一串联滞后校正装置,使系统满足下列要求:(1)相位裕度γ>40°;
(2)幅值裕度GM≥10dB,并保持原有的开环增益。
设单位反馈系统的开环传递函数
(大连理工大学2003年硕士研究生入学考试试题)某单位反馈系统的开环频率响应特性如表5-1所示。
 (1)求系统的相位裕量和幅值裕量。 (2)欲使系统具有20dB的幅值裕量,系统的开环增益应变化多少? (3)欲使系统具有40°的相位裕量,系统的开环增益应变化多少?
(1)求系统的相位裕量和幅值裕量。 (2)欲使系统具有20dB的幅值裕量,系统的开环增益应变化多少? (3)欲使系统具有40°的相位裕量,系统的开环增益应变化多少?
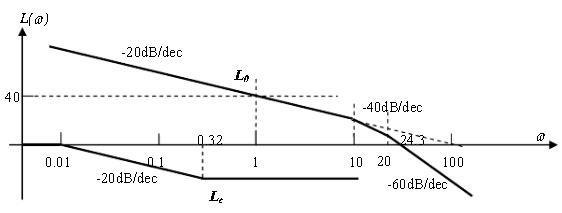
已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
已知单位反馈系统的开环传递函数 ,试设计串联滞后校正装置,使校正后系统的相位裕量γ≥40°,静态速度误差系数Kv≥5。
,试设计串联滞后校正装置,使校正后系统的相位裕量γ≥40°,静态速度误差系数Kv≥5。
已知单位反馈系统的开环传递函数为 ,试设计串联校正装置,使校正后 的系统相位裕量γ≥40°,增益裕量
,试设计串联校正装置,使校正后 的系统相位裕量γ≥40°,增益裕量 ,静态速度误差系数
,静态速度误差系数 。
。
已知单位反馈系统的开环传递函数为








 试求系统的相角裕量和幅值裕量。
试求系统的相角裕量和幅值裕量。









