 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
Mllib中线性会馆算法中的参数stepSize表示()。
A.要运行的迭代次数
B.梯度下降的步长
C.是否给数据加干扰特征或者偏差特征
D.Lasso和ridge的正规化参数
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.要运行的迭代次数
B.梯度下降的步长
C.是否给数据加干扰特征或者偏差特征
D.Lasso和ridge的正规化参数
如果结果不匹配,请 联系老师 获取答案
 更多“Mllib中线性会馆算法中的参数stepSize表示()。”相关的问题
更多“Mllib中线性会馆算法中的参数stepSize表示()。”相关的问题
已知3个带头结点的线性链表A、线性链表B和线性链表C中的结点均依元素值自小至大非递减排列(可能存在两个以上值相同的结点),编写算法对链表A进行如下操作:使操作后的链表A中仅留下3个表中均包含的数据元素的结点,且没有值相同的结点,并释放所有无用结点。限定算法的时间复杂度为D(m+n+p),其中m、n和p分别为3个表的长度。
A.卡尔曼滤波是一组线性最小均方估计的递推算法
B.卡尔曼滤波能够提供离散时间线性系统状态的线性最小均方估计
C.卡尔曼滤波在应用时需要对随机动态线性系统建立模型
D.在卡尔曼滤波算法推导中,系统扰动噪声和测量噪声都是假定为白噪声
试证明:二元线性回归模型 中变量X1与X2的参数OLS估计可以写成:
中变量X1与X2的参数OLS估计可以写成:
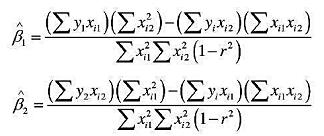
其中,r为X1与X2的相关系数。讨论r等于或接近1时,该模型的估计问题。
A.BP算法是一种将输出层误差反向传播给隐含层进行参数更新的方法
B.BP算法将误差从后向前传递,获得各层单元所产生误差,进而依据这个误差让各层单元修正各单元参数
C.对前馈神经网络而言,BP算法可调整相邻层神经元之间的连接权重大小
D.在BP算法中,每个神经元单元可包含不可偏导的映射函数
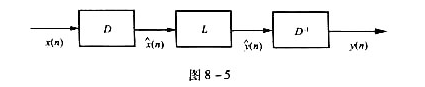
 ,若要直接把相互卷积的信号x1(n)与x2(n)分开将遇到困难.但是,对于两个相加的信号往往容易借助某种线性滤波方法使二者分离.图8-5示出用同态滤波解卷积的原理框图,其中各部分作用如下:
,若要直接把相互卷积的信号x1(n)与x2(n)分开将遇到困难.但是,对于两个相加的信号往往容易借助某种线性滤波方法使二者分离.图8-5示出用同态滤波解卷积的原理框图,其中各部分作用如下:(1)D运算表示将x(n)取z变换、取对数和逆z变换,得到包含x1(n)与x2(n)信息的
相加形式.
(2)L为线性滤波器,容易将两个相加项分离,取出所需信号.
(3)D-1相当于D的逆运算,也即取z变换、指数以及逆z变换,至此,可从x(n)中按需要分离出x1(n)或x2(n)完成解卷积运算.
试写出以上各步运算的表达式.
A.土地承包经营权和建设用地使用权
B.宅基地使用权和地役权
C.宅基地和农民房屋使用权
D.土地所有权和担保物权

















