 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
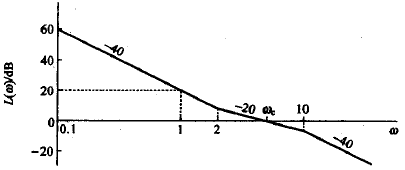
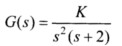
系统的开环传递函数为: 试求: (1)绘制系统的开环幅频渐近特性(需标注各段折线的
系统的开环传递函数为:
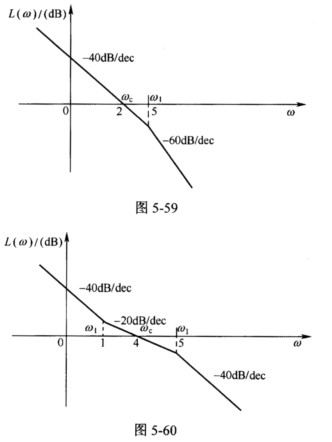 试求: (1)绘制系统的开环幅频渐近特性(需标注各段折线的斜率及转折频率),并求出系统的相位裕量见图5-59和图5-60。
试求: (1)绘制系统的开环幅频渐近特性(需标注各段折线的斜率及转折频率),并求出系统的相位裕量见图5-59和图5-60。
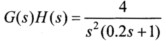 (2)在系统中串联一个比例一微分环节(s+1),绘制校正后系统的开环幅频渐近特性,并求出校正后系统的开环截止频率和相位裕量。 (3)比较前后的计算结果,说明相对稳定性较好的系统,对数幅频特性在中频段应具有的形状。
(2)在系统中串联一个比例一微分环节(s+1),绘制校正后系统的开环幅频渐近特性,并求出校正后系统的开环截止频率和相位裕量。 (3)比较前后的计算结果,说明相对稳定性较好的系统,对数幅频特性在中频段应具有的形状。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“系统的开环传递函数为: 试求: (1)绘制系统的开环幅频渐近…”相关的问题
更多“系统的开环传递函数为: 试求: (1)绘制系统的开环幅频渐近…”相关的问题
 ,而校正后的对数幅频特性如图5-69所示,求串联校正装置的传递函数。
,而校正后的对数幅频特性如图5-69所示,求串联校正装置的传递函数。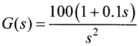

 试求: (1)确定系统在输入信号r(t)=l(t)作用下的调节时间ts。 (2)当r(t)=2cos(t+15°),求此时系统的稳态误差ess(t)。
试求: (1)确定系统在输入信号r(t)=l(t)作用下的调节时间ts。 (2)当r(t)=2cos(t+15°),求此时系统的稳态误差ess(t)。
 试求: (1)试绘制系统根轨迹的大致图形(需给出相应的计算),并讨论参数K对系统稳定性的影响。 (2)若增加一个零点z=-1,此时根轨迹的形状如何?该零点对系统稳定性有什么影响。 (3)在(2)中,若增加的零点是z=-3,此时根轨迹的形状又如何?有什么初步结论?
试求: (1)试绘制系统根轨迹的大致图形(需给出相应的计算),并讨论参数K对系统稳定性的影响。 (2)若增加一个零点z=-1,此时根轨迹的形状如何?该零点对系统稳定性有什么影响。 (3)在(2)中,若增加的零点是z=-3,此时根轨迹的形状又如何?有什么初步结论? ,试求系统的相位裕量γ和幅值裕量Kg。
,试求系统的相位裕量γ和幅值裕量Kg。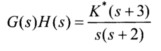 试求: (1)绘制根轨迹并证明复平面上根轨迹部分为圆。 (2)系统呈现欠阻尼状态时的开环增益范围。 (3)系统最小阻尼比时的闭环极点。
试求: (1)绘制根轨迹并证明复平面上根轨迹部分为圆。 (2)系统呈现欠阻尼状态时的开环增益范围。 (3)系统最小阻尼比时的闭环极点。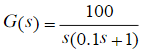 ,当输入信号r(t)=2+2t+t2时,试求系统的稳态误差。
,当输入信号r(t)=2+2t+t2时,试求系统的稳态误差。















