 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
单位反馈控制系统开环传递函数 试确定使相位裕度γ=45°的a值。
单位反馈控制系统开环传递函数

试确定使相位裕度γ=45°的a值。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
单位反馈控制系统开环传递函数
试确定使相位裕度γ=45°的a值。
如果结果不匹配,请 联系老师 获取答案
 更多“单位反馈控制系统开环传递函数 试确定使相位裕度γ=45°的a…”相关的问题
更多“单位反馈控制系统开环传递函数 试确定使相位裕度γ=45°的a…”相关的问题
已知单位反馈控制系统的开环传递函数如下。试求各系统的静态位置误差系数Kp,速度误差系数Ka和加速度误差系数Kv,并确定当输入信号分别为 和1+2t+t2时系统的稳态误差ess
和1+2t+t2时系统的稳态误差ess

已知单位反馈控制系统的开环传递函数如下。
试求各系统的静态位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka,并确定当输入信号分别为r(t)=ε(t)、2t、t2和1+2t+t2时系统的稳态误差ess。
已知单位反馈控制系统的开环传递函数为:
试求输入信号
(1)r(t)=I(t)
(2)r(t)=5t
(3)r(t)=
(4)r(t)=I(t)+5t+
分别作用于该系统时,系统的稳态误差。
(南京航空航天大学2005年硕士研究生入学考试试题)已知非最小相角系统的开环Bode图如图5-28所示,开环增益K>0。
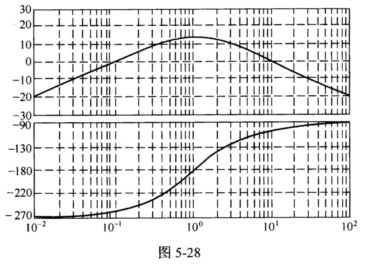 试求: (1)确定开环传递函数G(s)。 (2)用奈氏判据确定使系统稳定的K值范围。
试求: (1)确定开环传递函数G(s)。 (2)用奈氏判据确定使系统稳定的K值范围。
(中国科学院一中国科学技术大学2005年硕士研究生入学考试试题)单位负反馈控制系统如图3-40所示。
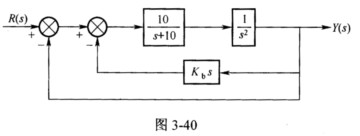 (1)试确定使系统闭环稳定的反馈系数Kb的取值范围。 (2)若已确定系统的一个闭环极点为-5,试求Kb的取值和其余的闭环极点。 (3)根据第(2)得到的系统配置,采用时域方法分析系统的瞬态性能和稳态性能。
(1)试确定使系统闭环稳定的反馈系数Kb的取值范围。 (2)若已确定系统的一个闭环极点为-5,试求Kb的取值和其余的闭环极点。 (3)根据第(2)得到的系统配置,采用时域方法分析系统的瞬态性能和稳态性能。
已知反馈控制系统的开环传递函数为:
 其反馈极性未知,欲保证闭环系统稳定,试确定根轨迹增益K*的范围。
其反馈极性未知,欲保证闭环系统稳定,试确定根轨迹增益K*的范围。
试画出K*值增大时的系统概略根轨迹图,并求出使系统产生振荡的K*的取值范围。
(电子科技大学2007年硕士研究生入学考试试题)己知反馈控制系统的开环传递函数为:
 但反馈极性未知,欲保证闭环系统稳定,试确定K的范围。
但反馈极性未知,欲保证闭环系统稳定,试确定K的范围。







 ,试确定使闭环系统稳定的T和K的范围。
,试确定使闭环系统稳定的T和K的范围。









