 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
考虑可控且可观的两个单输入一单输出系统S1和S2,它们的状态方程和输出方程分别为其中
考虑可控且可观的两个单输入一单输出系统S1和S2,它们的状态方程和输出方程分别为

其中


其中 .
.
现在考虑串联系统如图12-12所示.

(1)求串联系统的状态方程和输出方程,令
(2)检查串联系统的可控性和可观性;
(3)求系统S1和S2分别的转移函数及串联系统的转移函数;串联系统转移函数有无零极点相消现象?(2)的结果说明什么?
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“考虑可控且可观的两个单输入一单输出系统S1和S2,它们的状态…”相关的问题
更多“考虑可控且可观的两个单输入一单输出系统S1和S2,它们的状态…”相关的问题
 (1)给出该传递函数的一个能控标准型实现[输入u、输出y、状态x]。 (2)上述能控标准型系统引入状态反馈u=y+kx后,问: 1)闭环系统(输入v、输出y、状态x)是否一定能控;若是,请给出证明;若否,给出一个尽可能简单的反例。 2)闭环系统(输入v、输出y、状态x)是否一定能观;若是,请给出证明;若否,给出一个尽可能简单的反例。 注:上述“尽可能简单”是指闭环系统的传送函数阶数最低,且静态增益为1。要求求出k及相应的闭环传递函数Ga(s)。
(1)给出该传递函数的一个能控标准型实现[输入u、输出y、状态x]。 (2)上述能控标准型系统引入状态反馈u=y+kx后,问: 1)闭环系统(输入v、输出y、状态x)是否一定能控;若是,请给出证明;若否,给出一个尽可能简单的反例。 2)闭环系统(输入v、输出y、状态x)是否一定能观;若是,请给出证明;若否,给出一个尽可能简单的反例。 注:上述“尽可能简单”是指闭环系统的传送函数阶数最低,且静态增益为1。要求求出k及相应的闭环传递函数Ga(s)。 (1)给出该传递函数的一个能控标准型实现。 (2)研究系统的能控性、能观性、李雅普诺夫意义下的稳定性、渐近稳定性和BIBO稳定性。 (3)当系统BIBO稳定时,对上述能控标准型实现进行能观性分解。
(1)给出该传递函数的一个能控标准型实现。 (2)研究系统的能控性、能观性、李雅普诺夫意义下的稳定性、渐近稳定性和BIBO稳定性。 (3)当系统BIBO稳定时,对上述能控标准型实现进行能观性分解。 (1)已知cAib=0,(i=1,2,…,n-2),但cAn-1b≠0,试证明该系统是既能控又能观的。 (2)证明该系统的传递函数是:
(1)已知cAib=0,(i=1,2,…,n-2),但cAn-1b≠0,试证明该系统是既能控又能观的。 (2)证明该系统的传递函数是:
 (1)若A非奇异,证明:系统在零初态条件下的单位阶跃响应是: y(t)=cA-1(eAt-1)b (2)从能控性判据出发,证明:若系统能控,则对任意的实数λ,增广矩阵
(1)若A非奇异,证明:系统在零初态条件下的单位阶跃响应是: y(t)=cA-1(eAt-1)b (2)从能控性判据出发,证明:若系统能控,则对任意的实数λ,增广矩阵 一定满秩。
一定满秩。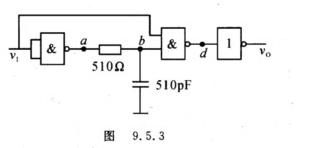
 (1)画出电路图; (2)若外接定时电容C1=C2=lμF,试确定定时电阻的数值。
(1)画出电路图; (2)若外接定时电容C1=C2=lμF,试确定定时电阻的数值。1.jpg) (1)设输入v1的波形如图7.3.1(a)所示,试画出v12及v0的波形。
(1)设输入v1的波形如图7.3.1(a)所示,试画出v12及v0的波形。2.jpg) (2)试确定电阻R的值,使输出脉冲宽度为10μs。
(2)试确定电阻R的值,使输出脉冲宽度为10μs。















