题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
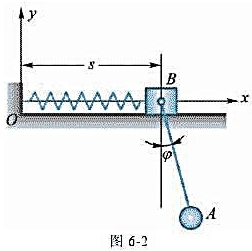
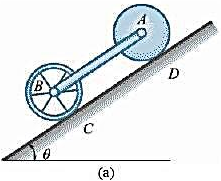
摆杆AB与水平杆GD以铰链A连接,如图(a)所示。水平杆作平动,AB杆可在套筒EF内滑动,同时又随套筒绕固定轴O摆动。
摆杆AB与水平杆GD以铰链A连接,如图(a)所示。水平杆作平动,AB杆可在套筒EF内滑动,同时又随套筒绕固定轴O摆动。已知:l=1m。在图示位置φ=30°时,GD杆的速度v=2m/s,方向向右;加速度a=0.5m/s2,方向向左。试求:
(1)套筒EF的角速度以及AB杆在套筒中滑动的速度;
(2)套筒EF的角加速度以及AB杆在套筒中滑动的加速度;
(3)摆杆AB上与O轴重合之点O1的速度和加速度。

 答案
答案
思路:本题为套筒摆动类型的机构。AB摆杆相对于套筒EF是沿套筒轴线作平动,因此AB杆上各点相对于套筒的相对速度相同,方位沿套筒轴线。若将动坐标系固连于套筒,对铰链A进行点的复合运动分析,就有清楚的各项运动,容易分析求解。
(1)取铰链A为动点,动坐标系固连于套筒EF,定坐标系固连于机架。
运动分析
动点的绝对运动:水平直线运动;
动点的相对运动:沿套筒轴线AB的直线运动。
牵连运动:动坐标系随套筒绕O轴作定轴转动。
速度分析
动点的绝对速度:va=v。
动点的相对速度vr:方位沿AB直线,大小未知。
动点的牵连速度:牵连点是在动坐标系上与铰链A重合的一点。形象地说,是在套筒延长部分上的A1点。由于套筒绕O轴转动,可知ve的方位垂直于OA线,大小未知。
根据速度合成定理
va=ve+vr
作速度平行四边形,如图(a),得
ve=vacosφ=1.73m/s
所以,套筒的角速度为

得 vr=vasinφ=1m/s 方向如图(a)
此即杆AB在套筒中滑动的速度。
(2)运动分析同(1),现作加速度分析。
动点的绝对加速度:由已知条件aa=a。
动点的相对加速度ar:方位沿AB线,指向假设如图(b);大小未知。
动点的牵连加速度有法向和切向两个分量:
动点的科氏加速度aC:方向垂直于vr,如图(b),其大小为
根据牵连运动为转动时的加速度合成定理
将此式在Ax轴上投影,如图(b),得
即
所以套筒的角加速度
将加速度矢量式在Ay轴上投影,如图(b),得
即
此即杆AB在套筒中滑动的加速度。
(3)取AB杆上与O轴重合之点O1为动点,动坐标系固连于套筒,定坐标系固连于机架。
运动分析
动点的绝对运动未知;动点的相对运动为沿套筒轴线AB的直线运动。牵连运动为动坐标系随套筒绕O轴的定轴转动。
速度分析
动点的绝对速度va为题意需求;动点的相对速度vr应与A点相对套筒的相对速度相同;动点的牵连速度ve,由于牵连点就是套筒的转轴O点,所以ve=0。
根据速度合成定理 va=ve+vr
可得AB杆上O1点的速度为
va=vr=1m/s 方向与vr相同
加速度分析
动点的绝对加速度aa为题意需求;动点的相对加速度ar和科氏加速度aC与A点相同;动点的牵连加速度,由牵连点可知ae=0。
根据牵连运动为转动时的加速度合成定理
aa=ae+ar+aC
可得AB杆上O1点的加速度为
 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“摆杆AB与水平杆GD以铰链A连接,如图(a)所示。水平杆作平…”相关的问题
更多“摆杆AB与水平杆GD以铰链A连接,如图(a)所示。水平杆作平…”相关的问题




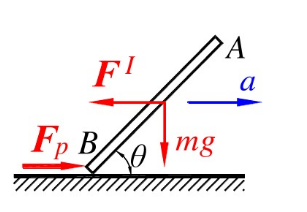
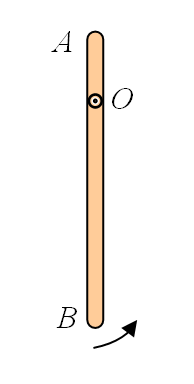
 。开始时杆自由悬挂,静止于竖直位置,现给杆一个起始角速度
。开始时杆自由悬挂,静止于竖直位置,现给杆一个起始角速度 ,使之运动起来。若要杆恰能持续转动而不往复摆动(不计一切摩擦),则
,使之运动起来。若要杆恰能持续转动而不往复摆动(不计一切摩擦),则 要满足的条件是()。
要满足的条件是()。