题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
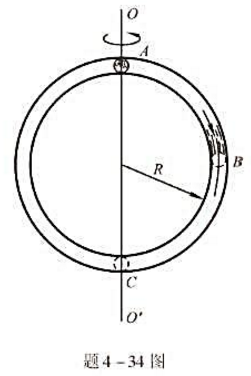
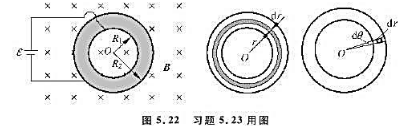
如题4-34图所示,有一空心圆环可绕竖直轴OO’自由转动,转动惯量为J0,环的半径为R,初始的角
速度为ω0,今有一质量为m的小球静止在环内A点,由于微小扰动使小球向下滑动。问小球到达B、C点时,环的角速度与小球相对于环的速度各为多少?(假设环内壁光滑。)
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“如题4-34图所示,有一空心圆环可绕竖直轴OO’自由转动,转…”相关的问题
更多“如题4-34图所示,有一空心圆环可绕竖直轴OO’自由转动,转…”相关的问题
图(a)所示圆环以角速度ω0绕铅垂轴z自由转动,圆环半径为R,对轴z的转动惯量为J。在圆环中的最高处A点上放一质量为m的小球,设由于微小的干扰使小球离开A点。求当小球到达B点时圆环的角速度和小球的速度。圆环的摩擦忽略不计。

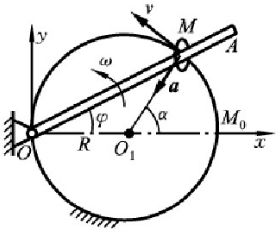
图所示机构中的小环M,同时套在半径为R的固定圆环和摇杆OA上,摇杆OA绕O轴以等角速度ω转动。运动开始时,摇杆OA在水平位置。
图(a)所示AB梁的A端固定,B端有一竖直拉杆BC,梁的弯曲刚度为EI,竖杆的抗拉刚度为EA,求竖杆BC的内力。

有一空心圆管A套在实心圆杆B的一端,如图(a)所示,两杆在同一横截面处各有一直径相同的贯穿孔,但两孔的中心线的夹角为β[图(b)]。现在杆B上施加外力偶,使其扭转到两孔对准的位置,并在孔中装上销钉。求在外力偶除去后两杆所受的扭矩。

一个大公司有一个总部和三个下属部门。公司分配到的网络前缀是192.77.33/24。公司的网络布局如题4-30图所示。总部共有五个局域网,其中的LAN1一LAN4都连接到路由器R,上,R1再通过LAN5与路由器R2连。R2远地的三个部门的局域网LAN6~LAN8通过广域网相连。每一个局域网旁边标明的数字是局域网上的主机数。试给每一个局域网分配一个合适的网络前缀。
.jpg)
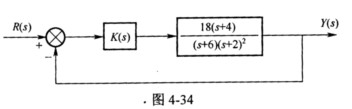
(中国科学院一中国科学技术大学2007年硕士研究生入学考试试题)反馈控制系统如图4-34所示,取控制器
 。
。
 (1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
(1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。