 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
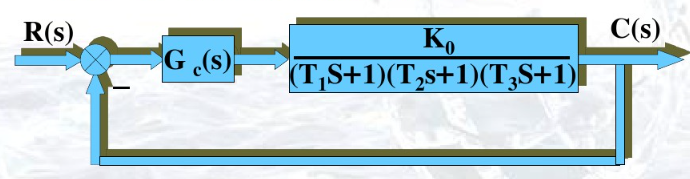
伺服系统的结构如图所示计算三种输入下的系统给定误差:(1)
伺服系统的结构如图所示计算三种输入下的系统给定误差:(1)
伺服系统的结构如图所示

计算三种输入下的系统给定误差:(1)
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
伺服系统的结构如图所示
计算三种输入下的系统给定误差:(1)
如果结果不匹配,请 联系老师 获取答案
 更多“伺服系统的结构如图所示计算三种输入下的系统给定误差:(1)”相关的问题
更多“伺服系统的结构如图所示计算三种输入下的系统给定误差:(1)”相关的问题
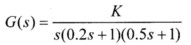
已知随动系统的开环传递函数G(s)=

调速系统动态结构图如图所示。已知K0=55.58,T1=0.049,T2=0.026,Ts= 0.00167。要求采用PI控制器进行校正,使系统实现阶跃信号输入之下无静差,并具有足够的 稳定裕量。

设有单位反馈的火炮指挥仪伺服系统,其开环传递函数为:
 若要求系统最大输出速度为2r/min,输出位置的容许误差小于2°,试求: (1)确定满足上述指标的最小K值,计算该K值下系统的相角裕量和幅值裕量。 (2)在前向通路中串接超前校正网络:
若要求系统最大输出速度为2r/min,输出位置的容许误差小于2°,试求: (1)确定满足上述指标的最小K值,计算该K值下系统的相角裕量和幅值裕量。 (2)在前向通路中串接超前校正网络:
 计算校正后系统的相角裕量和幅值裕量,说明超前校正对系统动态性能的影响。
计算校正后系统的相角裕量和幅值裕量,说明超前校正对系统动态性能的影响。























