题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
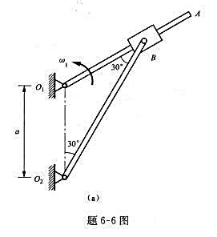
如图9-4所示,O1A杆的角速度为ω1,板ABC和杆O1A铰接。问图中O1A和AC上各点的速度分布规律对不对?
如图9-4所示,O1A杆的角速度为ω1,板ABC和杆O1A铰接。问图中O1A和AC上各点的速度分布规律对不对?

 答案
答案
不对。板ABC和杆O1A是两个刚体,前者作平面运动(在该瞬时绕AO1与BO2延长线的交点作瞬时转动),后者绕O1(即,过O1点且与纸面垂直的轴)作定轴转动,遵从各自的运动规律,而公共点A同时满足上述两种运动规律。事实上,过了这个瞬时,AC与AO1就不共线了。
 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“如图9-4所示,O1A杆的角速度为ω1,板ABC和杆O1A铰…”相关的问题
更多“如图9-4所示,O1A杆的角速度为ω1,板ABC和杆O1A铰…”相关的问题
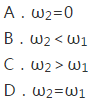
 时,轮2的角速度和角加速度。
时,轮2的角速度和角加速度。
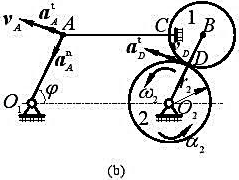
 ,当
,当 时,齿轮II的角速度和角加速度为() 。
时,齿轮II的角速度和角加速度为() 。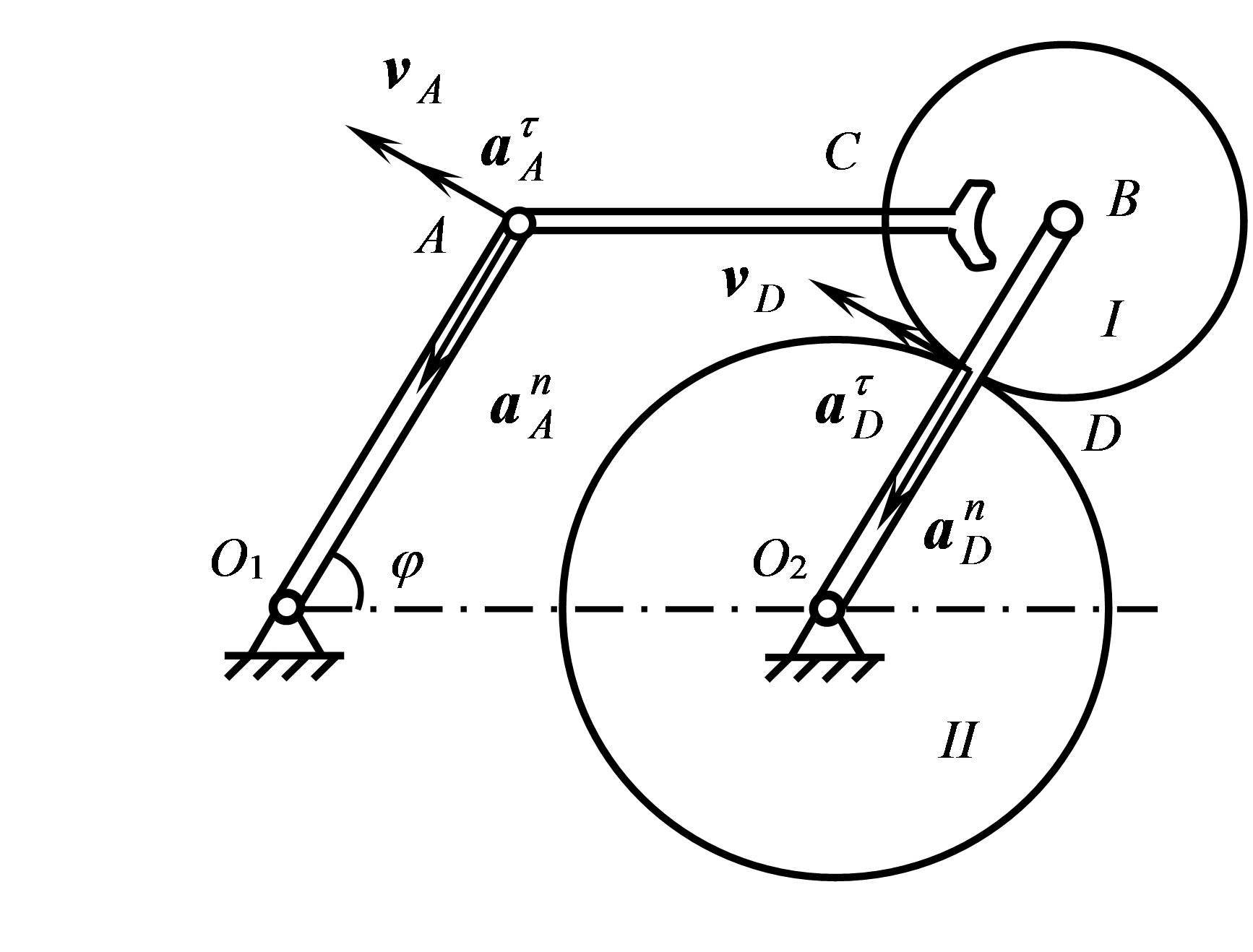

 ,杆O1A角速度为ω1,则O2B杆的角速度ω2为()。
,杆O1A角速度为ω1,则O2B杆的角速度ω2为()。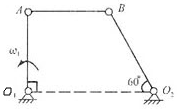
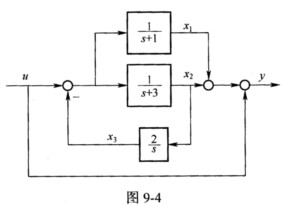 (1)列写系统的状态空间表达式。 (2)当初态x1(0)=1,x2(0)=-1,x3(0)=0,输入u是单位阶跃信号时,求状态x(t)的表达式及输出y(2)的值。
(1)列写系统的状态空间表达式。 (2)当初态x1(0)=1,x2(0)=-1,x3(0)=0,输入u是单位阶跃信号时,求状态x(t)的表达式及输出y(2)的值。
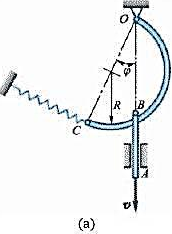
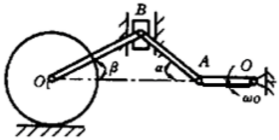
 ,求此后任意瞬时t,OC杆的角速度ω和点C的速度。
,求此后任意瞬时t,OC杆的角速度ω和点C的速度。