

 如果结果不匹配,请
如果结果不匹配,请 
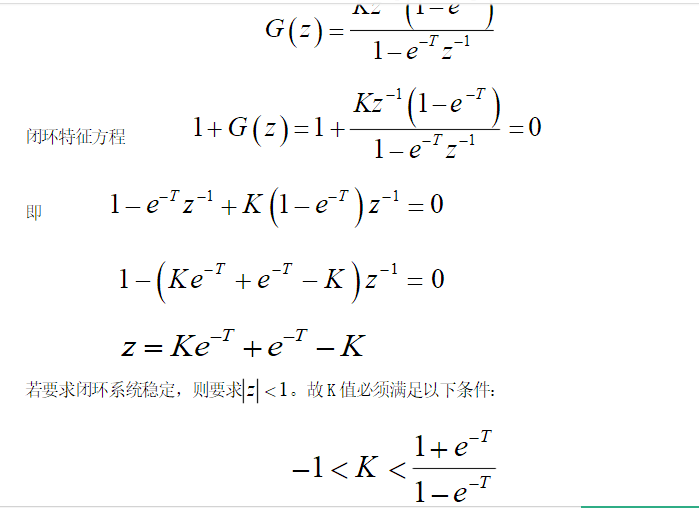
 更多“设闭环离散系统如图所示。试分析系统的稳定性,并确定K值的稳定…”相关的问题
更多“设闭环离散系统如图所示。试分析系统的稳定性,并确定K值的稳定…”相关的问题
第1题
设离散系统如图7-21所示。采样周期T=1s,Gh(s)为零阶保持器,而。 试求: (1)当K=5时,分别在ω
设离散系统如图7-21所示。采样周期T=1s,Gh(s)为零阶保持器,而
 。
。
 试求: (1)当K=5时,分别在ω域和z域中分析系统的稳定性。 (2)确定使系统稳定的K值范围。
试求: (1)当K=5时,分别在ω域和z域中分析系统的稳定性。 (2)确定使系统稳定的K值范围。

第4题
设单位负反馈系统的开环传递函数为 试求:(1)使闭环系统稳定的开环增益K的取值范围;(2)若要求系统全部闭
设单位负反馈系统的开环传递函数为

试求:(1)使闭环系统稳定的开环增益K的取值范围;(2)若要求系统全部闭环极点分布在[s]平面的Res=-1的左侧,确定开环增益K的取值范围。
第5题
(中国科学院一中国科学技术大学2005年硕士研究生入学考试试题)设单位负反馈系统的根轨迹图如图4-
(中国科学院一中国科学技术大学2005年硕士研究生入学考试试题)设单位负反馈系统的根轨迹图如图4-36所示。
 (1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
(1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
第6题
设一系统结构如图所示,要求系统的速度误差系数Kv≥20,相角稳定裕度γ'≥50°,为满足系统性能指标的要求,试
设一系统结构如图所示,要求系统的速度误差系数Kv≥20,相角稳定裕度γ'≥50°,为满足系统性能指标的要求,试设计超前校正装置的参数。

第8题
设离散系统如图7-23所示。 其中T=0.1s,K=1,试求静态误差系数Kp、Kv、Ka,并求系统在r(t)=t作
设离散系统如图7-23所示。
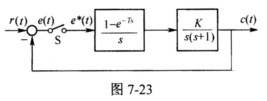 其中T=0.1s,K=1,试求静态误差系数Kp、Kv、Ka,并求系统在r(t)=t作用下的稳态误差e*(∞)。
其中T=0.1s,K=1,试求静态误差系数Kp、Kv、Ka,并求系统在r(t)=t作用下的稳态误差e*(∞)。
第10题
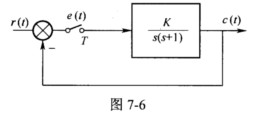
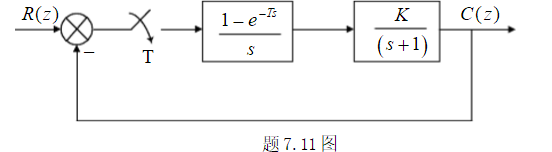
已知离散系统结构图如图7-6所示,T为采样周期。 (1)要求系统在r(t)=t作用下的稳态误差ess=0.1T,
已知离散系统结构图如图7-6所示,T为采样周期。
 (1)要求系统在r(t)=t作用下的稳态误差ess=0.1T,试确定相应的开环增益K。 (2)当K=10时,确定使系统稳定的采样周期T的取值范围。
(1)要求系统在r(t)=t作用下的稳态误差ess=0.1T,试确定相应的开环增益K。 (2)当K=10时,确定使系统稳定的采样周期T的取值范围。