题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
系统的开环传递函数为,若采用Gc(s)=的串联超前校正装置,求校正后的相位裕量。
系统的开环传递函数为
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
系统的开环传递函数为
如果结果不匹配,请 联系老师 获取答案
 更多“系统的开环传递函数为,若采用Gc(s)=的串联超前校正装置,…”相关的问题
更多“系统的开环传递函数为,若采用Gc(s)=的串联超前校正装置,…”相关的问题
某随动系统的开环传递函数为
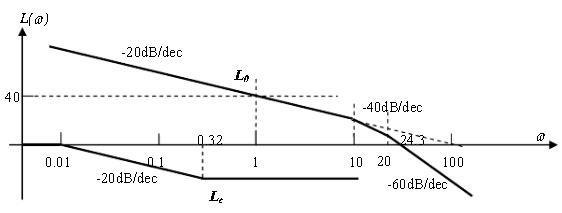
如图所示,最小相位系统的开环对数幅频曲线为L0(ω),串联校正装置对数幅频曲线为Lc(ω)。
(1) 求未校正系统开环传递函数G0(s)及串联校正装置传递函数Gc(s)。
(2) 在图中画出校正后系统的开环对数幅频曲线L(ω),并求出校正后系统的相位裕量γ。
已知一单位反馈系统,未校正系统的开环传递函数G0(s)和校正装置Gc(s)的对数幅频曲线如图 所示。要求绘制校正后系统的对数幅频曲线,并写出校正后系统的开环传递函数。
已知一单位反馈系统,未校正系统的开环传递函数G0(s)和两种校正装置Gc(s)的对数幅频曲线如图 (a)、(b)所示。要求绘制校正后系统的对数幅频曲线,并写出每种装置校正后系统的开环传递函数。
已知一单位反馈系统,未校正系统的开环传递函数G0(s)和校正装置Gc(s)的对数幅频曲线如图所示。要求绘制校正后系统的对数幅频曲线,并写出校正后系统的开环传递函数。

已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
已知一单位反馈系统,未校正系统的开环传递函数G0(s)和两种校正装置Gc(s)的对数幅频曲线如图(a)、(b)所示。要求绘制校正后系统的对数幅频曲线,并写出每种装置校正后系统的开环传递函数。

A.φ(s)/(1+φ(s))
B.φ(s)/(1-φ(s))
C.(1+φ(s))/φ(s)
D.(1-φ(s))/φ(s)
设单位负反馈系统的开环传递函数为

试求:(1)使闭环系统稳定的开环增益K的取值范围;(2)若要求系统全部闭环极点分布在[s]平面的Res=-1的左侧,确定开环增益K的取值范围。
试求: (1)已知一最小相位系统开环的对数幅频特性如图5-69所示。试写出系统开环传递函数G(s),计算相位裕量γ和增益裕量h。 (2)若系统原有的开环传递函数为
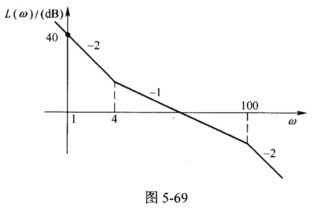 ,而校正后的对数幅频特性如图5-69所示,求串联校正装置的传递函数。
,而校正后的对数幅频特性如图5-69所示,求串联校正装置的传递函数。