题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
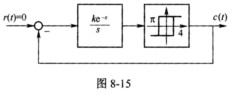
某非线性系统结构如图8-15所示。 试求: (1)若系统存在频率为ω=π/4自激振荡,试求此时的k值和振
某非线性系统结构如图8-15所示。
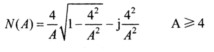 试求: (1)若系统存在频率为ω=π/4自激振荡,试求此时的k值和振幅A。 (2)确定系统只有一个自振点的条件。 注:线性环节中的K>0;非线性环节的描述函数为:
试求: (1)若系统存在频率为ω=π/4自激振荡,试求此时的k值和振幅A。 (2)确定系统只有一个自振点的条件。 注:线性环节中的K>0;非线性环节的描述函数为:
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某非线性系统结构如图8-15所示。
试求: (1)若系统存在频率为ω=π/4自激振荡,试求此时的k值和振幅A。 (2)确定系统只有一个自振点的条件。 注:线性环节中的K>0;非线性环节的描述函数为:
如果结果不匹配,请 联系老师 获取答案
 更多“某非线性系统结构如图8-15所示。 试求: (1)若系统存在…”相关的问题
更多“某非线性系统结构如图8-15所示。 试求: (1)若系统存在…”相关的问题
已知非线性系统结构图如图8-11所示,描述该系统的动态方程如下:
 试求: (1)G1(s)、G2(s),画出非线性环节的输入输出特性关系曲线。 (2)用描述函数法研究系统的稳定性,若有白振,试求出自振参数。
试求: (1)G1(s)、G2(s),画出非线性环节的输入输出特性关系曲线。 (2)用描述函数法研究系统的稳定性,若有白振,试求出自振参数。

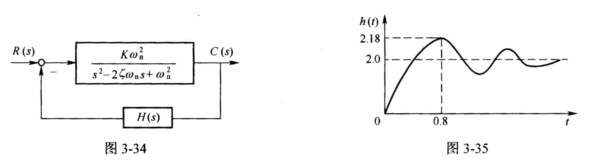
(南京航空航天大学2003年硕士研究生入学考试试题)已知某系统结构如图3-34所示。 试求: (1)当反馈通道传递函数H(s)=1时,其开环系统单位阶跃响应曲线如图3-35所示,试确定系统的增益K、阻尼比ζ和自然频率ωn。 (2)若要求系统的阻尼比提高到ζ’,而保持系统增益K和自然频率ωn不变,试设计反馈通道的传递函数H(s)。
某非线性系统如图8-29所示,图中非线性环节的描述函数为
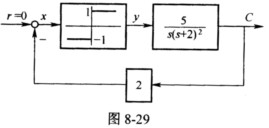 ,试确定系统产生自振的振幅和频率。
,试确定系统产生自振的振幅和频率。

非线性控制系统如图8-35所示。 试求: (1)给出起点在
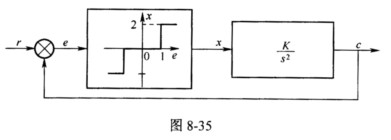 。 (2)计算相轨迹旋转一周所需时间。
。 (2)计算相轨迹旋转一周所需时间。

某系统结构图如图5-72所示。
 试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出Cs(t)和稳态误差es(t): (1)r(t)=sin2t。 (2)r(t)=sin(t+30°)-2cos(2t-45°)。
试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出Cs(t)和稳态误差es(t): (1)r(t)=sin2t。 (2)r(t)=sin(t+30°)-2cos(2t-45°)。
某系统的结构图如图4-47所示。
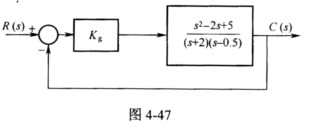 试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳定的Kg值的范围。 (3)用根轨迹法确定使系统的阶跃响应不出现超调的Kg的最大取值。
试求: (1)绘制系统的根轨迹草图。 (2)用根轨迹法确定使系统稳定的Kg值的范围。 (3)用根轨迹法确定使系统的阶跃响应不出现超调的Kg的最大取值。
系统结构如图3.62所示,
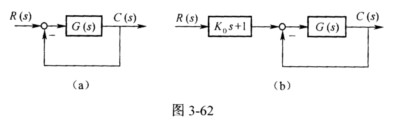 ,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
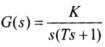
(南京理工大学2002年硕士研究生入学考试试题)某反馈控制系统的框图如图5-42(a)所示,其传递函数的频域响应曲线如图5-42(b)所示,假设系统具有最小相位传递函数。
 试求: (1)当G3断开时,计算系统的阻尼系数ζ。 (2)当G3闭合时,计算系统的阻尼系数ζ。
试求: (1)当G3断开时,计算系统的阻尼系数ζ。 (2)当G3闭合时,计算系统的阻尼系数ζ。