题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
控制系统结构图如图3-64所示。 试选择参数a,b,c的值,使系统响应速度信号时无稳态误差。
控制系统结构图如图3-64所示。
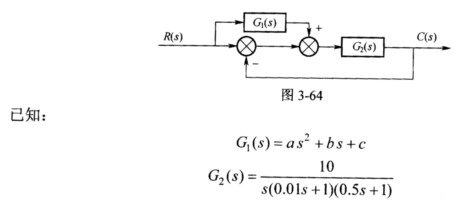 试选择参数a,b,c的值,使系统响应速度信号时无稳态误差。
试选择参数a,b,c的值,使系统响应速度信号时无稳态误差。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
控制系统结构图如图3-64所示。
试选择参数a,b,c的值,使系统响应速度信号时无稳态误差。
如果结果不匹配,请 联系老师 获取答案
 更多“控制系统结构图如图3-64所示。 试选择参数a,b,c的值,…”相关的问题
更多“控制系统结构图如图3-64所示。 试选择参数a,b,c的值,…”相关的问题
已知控制系统的结构图如图3.63所示。
 试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
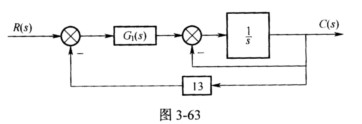 ,且r(t)=10.l(t)时,求tp、σp、ess。
,且r(t)=10.l(t)时,求tp、σp、ess。
已知控制系统结构图如图5-74所示。
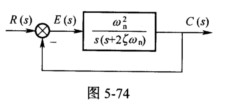 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
如图3-60所示的控制系统结构图,误差E(s)在输入端定义,扰动输入n(t)=2.1(t)。
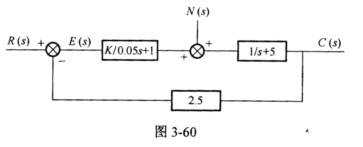 试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?
试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?
如图a所示为小锥齿轮轴系部件结构图(小锥齿轮与轴一体,成为齿轮轴)。试改正图中不合理或错误的结构,并简述原因。

系统的结构图如图所示。试依据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出和稳态误差。

已知系统结构图如图3-38所示,采样间隔为T=l s,试求取开环脉冲传递函数G(z)、闭环脉冲传递函数
某系统结构图如图5-72所示。
 试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出Cs(t)和稳态误差es(t): (1)r(t)=sin2t。 (2)r(t)=sin(t+30°)-2cos(2t-45°)。
试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出Cs(t)和稳态误差es(t): (1)r(t)=sin2t。 (2)r(t)=sin(t+30°)-2cos(2t-45°)。
两个系统的结构图分别如图4-49所示。试求: (1)画出当k(0→∞)变动时,图4-49(a)所示系统的根轨迹。 (2)画出当p(0→∞)变动时,图4-49(b)所示系统的根轨迹(即广义根轨迹)。 (3)试确定k,p值,使得两个系统的闭环极点相同。