题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
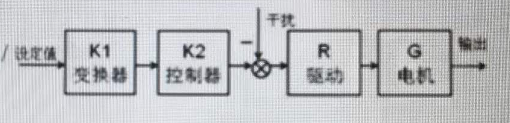
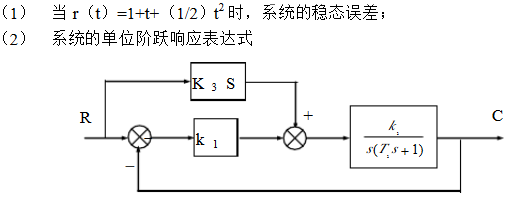
复合控制系统如图39所示。其中K1=2K2=1,T2=0.25s,K2K3=1。求
复合控制系统如图3-9所示。其中K1=2K2=1,T2=0.25s,K2K3=1。求
 答案
答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
复合控制系统如图3-9所示。其中K1=2K2=1,T2=0.25s,K2K3=1。求
答案
如果结果不匹配,请 联系老师 获取答案
 更多“复合控制系统如图39所示。其中K1=2K2=1,T2=0.2…”相关的问题
更多“复合控制系统如图39所示。其中K1=2K2=1,T2=0.2…”相关的问题
已知比例一微分控制系统如图4-59所示。
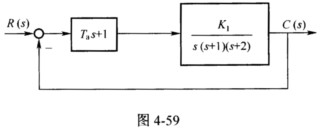 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
设高速列车停车控制系统如图3-56所示。
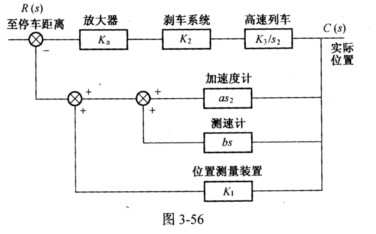 已知参数:K1=1,K2=1000,K3=0.001,a=0.1,b=0.1。试证:当放大器增益K取任何正值时,系统都是稳定的。
已知参数:K1=1,K2=1000,K3=0.001,a=0.1,b=0.1。试证:当放大器增益K取任何正值时,系统都是稳定的。
(燕山大学2000年硕士研究生入学考试试题)系统结构图如图5-43所示。
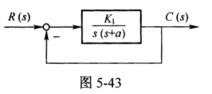 其中a,K1均大于零。当输入为r(t)=sint时,系统的稳态响应C(t)=sin(t-45°),问系统的相角裕量是多少?
其中a,K1均大于零。当输入为r(t)=sint时,系统的稳态响应C(t)=sin(t-45°),问系统的相角裕量是多少?
(哈尔滨工业大学2004年硕士研究生入学考试试题)设控制系统如图3-28所示,
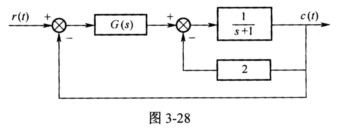 其中前向通道中G(s)的单位阶跃响应为1-1.25e-3tsin(5t+53.1°),求r(t)=10.1(t)时系统的稳态误差。
其中前向通道中G(s)的单位阶跃响应为1-1.25e-3tsin(5t+53.1°),求r(t)=10.1(t)时系统的稳态误差。
喷嘴阀—挡板测距装置如图6-1所示。当挡板A相对喷嘴B移动时,流通面积a与x成比例。固定节流孔的流量—压力降方程为

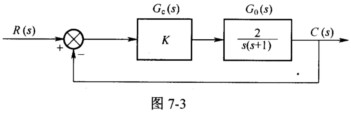
控制系统如图7-3所示,其中Gc(s)为校正环节。
 (1)若用计算机实现校正环节Gc(s),画出采样系统的方框图。 (2)若采样周期T=1s,求使采样系统稳定的K的取值范围。
(1)若用计算机实现校正环节Gc(s),画出采样系统的方框图。 (2)若采样周期T=1s,求使采样系统稳定的K的取值范围。
(武汉科技大学2004年硕士研究生入学考试试题)图5-31(a)所示的反馈控制系统,其中G1的极坐标图、G2的对数幅频特性分别如图5-31(b)、图5-31(c)所示。
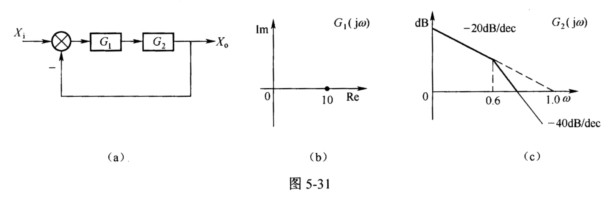 试求:闭环系统的阻尼比。
试求:闭环系统的阻尼比。
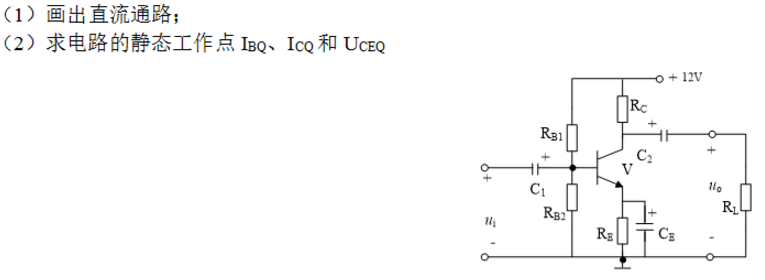
共发射极电压放大电路如图7-32(a)所示,已知RP=5kΩ,RB1=15kΩ,RB2=10kΩ,RC2=2kΩ,RE=2kΩ,VCC=12V,β=40,RL=2kΩ,试求:
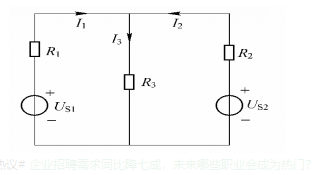
已知电路如图a所示,US1=10V,R1=1kΩ,R2=2kΩ,试求ab端戴维南等效电路 。
。
如图4.42所示电路,已知UBE=0.7V,RB1=30kΩ,RB2=10kΩ,Rc=2kΩ,RE=1kΩ,VCC=12V,RL=3kΩ,β=50。