如果结果不匹配,请
如果结果不匹配,请 
 更多“根据比例环节的方块图写出传递函数式为:()”相关的问题
更多“根据比例环节的方块图写出传递函数式为:()”相关的问题
A.把一个输入信号同时作为若干环节的输入
B.所有环节的输出端连接在--起
C.总传递函数等于各环节传递函数的之和
D.总传递函数等于各环节传递函数的乘积
A.惯性环节与延时环节
B.比例环节、惯性环节与延时环节
C.惯性环节与导前环节
D.比例环节、惯性环节与导前环节
(武汉科技大学2004年硕士研究生入学考试试题)机械系统如图5-33所示。
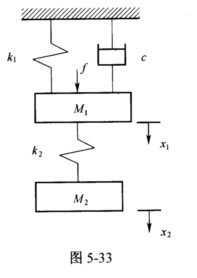 试求: (1)建立系统微分方程并作出系统方块图。 (2)求以f为输入,x1为输出的传递函数。 (3)当f(t)=Asinω0t时,为使M1在稳态时不产生振动,K2,M2应满足什么关系?
试求: (1)建立系统微分方程并作出系统方块图。 (2)求以f为输入,x1为输出的传递函数。 (3)当f(t)=Asinω0t时,为使M1在稳态时不产生振动,K2,M2应满足什么关系?
如图9-5所示系统由三个环节A,B,C组成,它们各有对不同输入r(t)的响应曲线y(t)分别如图9-6所示。
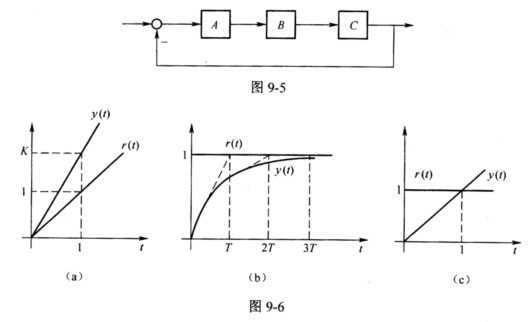 (1)该系统的三个环节A,B,C的传递函数是什么?开环系统的总传递函数是什么?画出其结构图。 (2)从结构图上选状态变量,写出状态空间表达式。 (3)当K=10,T=0.1时,求单位阶跃输入时系统的稳态误差和动态响应指标百分比超调σ%,上升时间ts,峰值时间tp。
(1)该系统的三个环节A,B,C的传递函数是什么?开环系统的总传递函数是什么?画出其结构图。 (2)从结构图上选状态变量,写出状态空间表达式。 (3)当K=10,T=0.1时,求单位阶跃输入时系统的稳态误差和动态响应指标百分比超调σ%,上升时间ts,峰值时间tp。
系统的开环传递函数为:
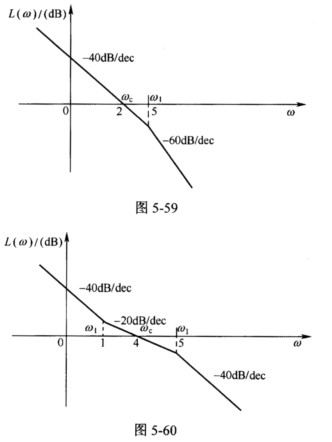 试求: (1)绘制系统的开环幅频渐近特性(需标注各段折线的斜率及转折频率),并求出系统的相位裕量见图5-59和图5-60。
试求: (1)绘制系统的开环幅频渐近特性(需标注各段折线的斜率及转折频率),并求出系统的相位裕量见图5-59和图5-60。
 (2)在系统中串联一个比例一微分环节(s+1),绘制校正后系统的开环幅频渐近特性,并求出校正后系统的开环截止频率和相位裕量。 (3)比较前后的计算结果,说明相对稳定性较好的系统,对数幅频特性在中频段应具有的形状。
(2)在系统中串联一个比例一微分环节(s+1),绘制校正后系统的开环幅频渐近特性,并求出校正后系统的开环截止频率和相位裕量。 (3)比较前后的计算结果,说明相对稳定性较好的系统,对数幅频特性在中频段应具有的形状。
设系统的传递函数为:
 试用状态反馈方法,将闭环极点配置在-2,-1+j,-1-j处,并写出闭环系统的动态方程和传递函数。
试用状态反馈方法,将闭环极点配置在-2,-1+j,-1-j处,并写出闭环系统的动态方程和传递函数。
 ,求
,求
已知系统传递函数为:
 试写出系统可控、不可观测,可观测、不可控,不可控、不可观测的动态方程。
试写出系统可控、不可观测,可观测、不可控,不可控、不可观测的动态方程。
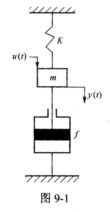
假设图9-1所示线性系统,外力u(t)是系统的输入量,质量的位移y(t)是系统的输出量,试写出该系统的状态空间方程;然后根据状态空间方程写出系统的传递函数。